Первый робот-черепаха
Один из первых известных роботов-черепах был создан в 1948 году. Их создал английский нейрофизиолог американского происхождения Уильям Грей Уолтер.
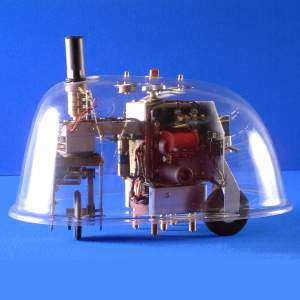
Первую из «черепашек» Уолтера звали Elmer – «электромеханический робот». У неё было три колеса, два электромотора, питаемых от аккумуляторов (один позволял ехать вперёд или назад, второй поворачивать), и два «чувствительных элемента»: фотоэлемент и механический контакт, который замыкался, когда Elmer натыкался на препятствие. Управление поведением черепашки осуществлялось при помощи электронной схемы с обратной связью, построенной всего на двух искусственных нейронах.
Поведение Элмера базировалось на трёх состояниях: поиск света («голод»), поворот к свету, избегание слишком яркого света и препятствий («боль»). Такое простейшее устройство заставляло робота совершать действия, которые могли бы, иди речь о животном, проинтерпретированы как наличие зачатков самосознания: «черепашка» аккуратно обходила препятствия, искала источники света, избегая слишком ярких, по мере того, как заряд аккумулятора иссякал, её интерес к источникам света рос, она уже меньше «боялась» яркого света, ехала к нему, но если яркость источника вблизи оказывалась чрезмерной, «пугалась», отъезжая или отворачивая.
Самой интересной была киберчерепаха по имени Кора (Cora – Conditional Reflex Automat – автомат условного рефлекса). У неё, помимо «зрения», были также слух (датчик звука) и память (конденсатор, способный в течение некоторого времени сохранять накопленный электрический заряд; все роботы Уолтера вообще были исключительно аналоговыми). Когда Кора двигалась по комнате, Уолтер подавал ей звуковой сигнал (свистел в блокфлейту), если на пути должно было оказаться препятствие. В результате Кора научилась, реагируя на свист, отворачивать от предполагаемого препятствия (даже если его, на самом деле, не было).
Невероятно удивительно, конечно, что черепашки Уолтера демонстрировали столь сложное поведение при столь простой конструкции. А с позиции дня сегодняшнего удивляет также и то, что происходило это в конце 1940-х.
Источник: http://hrenovina.net/11096
Робот-черепаха для исследования затонувших кораблей
Специалисты Таллинского технологического института разработали подводного робота-черепаху для исследования затонувших кораблей. Робот выполнен в виде цилиндра с двумя скругленными торцами. Движение осуществляется с помощью четырех пластиковых плавников, а установленная на устройстве камера позволяет ученым управлять роботом без визуального контакта с ним. О технических параметрах, таких как максимальное расстояние до пункта управления, глубина погружения или время работы не сообщается. Известно лишь то, что робот не нуждается в подключении кабеля для электропитания и передачи данных.
Разработчики утверждают, что выбор формы и принципа передвижения обусловлен требованиями заказчиков, специалистов по подводной археологии. Робот должен был быть небольшим, чтобы пролезать в недоступные или опасные для аквалангиста места и иметь возможность разворачиваться в ограниченном объеме. Кроме того, крайне желательно было избежать излишнего взбаламучивания ила, который делает воду непрозрачной и затрудняет управление роботом. Плавники вместо гребных винтов позволяют подобраться к цели за счет медленных и аккуратных взмахов, а также с их помощью можно развернуться как в горизонтальной, так и вертикальной продольной плоскости.
Интерес к постройке подводных роботов проявляют не только археологи. Автономные аппараты, способные работать под водой, конструируются по заказу военных, инженеров и океанологов. Роботы могут работать на любой глубине, вплоть до дна Марианской впадины и выполнять как исследовательские, так и прикладные задачи. К последним относится, например, перекрытие поврежденных трубопроводов.
Источник: lenta.ru

Черепаха-робот для подводной съемки морских жителей
Недавно в океан были запущены реалистично выполненные роботы-шпионы для наблюдения за жизнью дельфинов в дикой природе. Каждая модель способна свободно перемещаться в воде, оснащена радиоуправлением и HD-камерой. Задача робота - снять на видео естественное поведение морских млекопитающих, когда они не подозревают о том, что за ними наблюдает человек.
Эти необычные подводные видео-роботы были созданы известным британским режиссером фильмов о дикой природе Джоном Даунером (John Downer) для его нового ТВ-проекта - сериала "Dolphins: Spy in the Pod". Джон - автор популярных документальных сериалов ВВС "Эти загадочные животные" ("Weird Nature", 2002) и "Мир с высоты птичьего полета" ("Earthflight", 2011-2012).
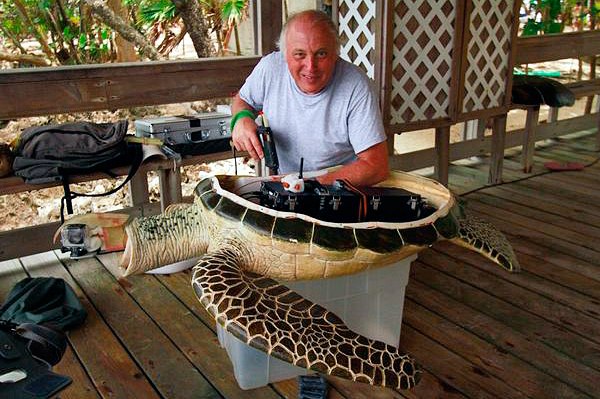
Продюсер сериала зоолог Роб Пиллэй (Rob Pilley) придумал и вместе с командой моделистов создал 13 роботов, использованных для съемок. Вот что он рассказывает: "Один из подводных роботов выполнен в виде морской черепахи. Эта точная копия настоящего животного запечатлела афалин, ровным строем катающихся на волнах. Дельфины - одни из самых умных животных на планете. Они сканировали наших роботов своими сонарами и точно знали, что это не живые существа. Но они их не боялись. И как только дельфины освоились с роботами, они дали волю своему здоровому любопытству. Это было очень важно для съемки животных, непрестанно находящихся в движении.
Дельфины замедлялись, чтобы поближе рассмотреть наших роботов-шпионов, а иногда даже поиграть с ними. Однажды они закружили нашу черепаху. Это случилось у берегов Мозамбика - мы наблюдали с лодки, как группа молодых дельфинов крутила робота.
Мы заставляли черепаху маневрировать, чтобы удержать дельфинов в кадре, но молодые самцы решили устроить потасовку прямо перед роботом. Они так быстро крутились вокруг него, что создали водоворот, который закружил и робота".
Источник: bbc-diving.ru

Робот-черепаха для исследования поведения черепах
Особый робот-черепаха создан американскими инженерами. Он может хорошо передвигаться по песчаному пляжу с помощью двух плавникообразных конечностей.
Инженеры заявили: "FlipperBot позволил нам изучить те аспекты походки черепах, за которыми практически невозможно проследить в дикой природе. На настоящий момент пляжи, где начинают свою жизнь новорожденные черепахи, находятся под угрозой исчезновения. Полученные нами выводы и дальнейшие эксперименты с роботом помогут изучить свойства таких пляжей и подобрать подходящие методы для спасения черепах".
Робота-черепаху создали ученые из Технологического института штата Джорджия (Атланта, США). Для этого им пришлось проследить за движением новорожденных черепашек по искусственному "песку", который состоял из маковых зерен. За рептилиями следили с помощью высокоскоростной камеры, а затем производился анализ работы мускулов и костей в ластах.
Эти данные и были использованы для того чтобы создать специального робота-черепаху FlipperBot. В процессе его создания были выяснены интересные особенности походки черепах, её сильные и слабые стороны. Например, у них есть особое "свободное" запястье, которое помогает двигаться по песку и не нарушать его покой. Благодаря этому черепахи двигаются по песку максимально быстро и не увязают в его гранулах.
Но эта же особенность не дает им возможности передвигаться быстро по песку, где прошлись человек или другие рептилии. Исследователи отмечают, что новорожденным черепахам это может мешать выбираться из кладки, когда они совершают "марш-бросок" к морю. Поэтому важно, чтобы пляж не был потревожен людьми. По мнению ученых, с помощью робота можно будет найти эффективные методы для спасения видов черепах, находящихся под угрозой исчезновения.



